Key points: basic concepts and system components of GPS positioning; basic GPS positioning principles.
Difficulties: The concepts and uses of absolute and relative GPS positioning, and static and dynamic positioning in the classification of GPS positioning methods.
Definition and History of GPS positioning
GPS Definition
Global Positioning System GPS (Global Position System) is a space rendezvous and fixed-point navigation system that can be used for timing and ranging, providing continuous, real-time, high-precision three-dimensional position, three-dimensional speed, and time information to users worldwide.
The generation and development of GPS, from TRANSIT to GPS
(1) In October 1957, the first artificial earth satellite in the sky, space-based electronic navigation was born.
(2) The United States built the Meridian Satellite Navigation and Positioning System (TRANSIT) in 1964.
(3) The United States began to build the Global Positioning System (GPS) in 1973, and it was fully completed and put into operation in 1994.
The initial development of GPS positioning was mainly used for military purposes. Such as the army, navy, and air force to provide real-time, all-weather, and global navigation services, intelligence collection, nuclear explosion monitoring, emergency communications, and demolition positioning.
As the GPS system enters the experimental and practical stage, the high degree of automation of its positioning technology and the high accuracy and great potential it achieves have attracted the general attention of governments and the great interest of surveyors.
Especially in recent years, GPS positioning technology has made rapid development in the research of application basis, the development of new application fields, and the development of software and hardware.
The composition of the GPS system
The space satellite part consists of 21 working satellites and 3 backup satellites.
The ground control part consists of 1 main control station, 5 monitoring stations, and 3 injection stations.
The basic types of user receivers are navigation type and terrestrial type. The earth type receiver is divided into single frequency type (L1) and dual-frequency type (L1, L2).
The GPS positioning method classification
The GPS positioning method can be divided into static positioning and dynamic positioning according to the state of the user receiver antenna in the measurement, and absolute positioning and relative positioning according to the positioning result.
Static positioning, that is, in the positioning process, the location of the receiver antenna (observatory) relative to the surrounding ground points, in a static state; while dynamic positioning is the opposite, that is, in the positioning process, the receiver antenna is in motion, the positioning results are continuously changing.
Absolute positioning, also known as single-point positioning, is the independent determination of the absolute position of the user receiver antenna (station) in the WGS-84 coordinate system using GPS.
Relative positioning is to determine the relative position between the receiver antenna (observatory) and a ground reference point in the WGS-84 coordinate system, or the relative position between the two observatories.
Various positioning methods can also have different combinations, such as static absolute positioning, static relative positioning, dynamic absolute positioning, dynamic relative positioning, etc. At present, in the field of engineering and mapping, the most widely used are static relative positioning and dynamic relative positioning.
According to the data solution of relative positioning, whether it is real-time or not, it can be divided into post-processing positioning and real-time dynamic positioning (RTK), among which, post-processing positioning can be further divided into static (relative) positioning and dynamic (relative) positioning.
GPS Positioning Principle
Absolute GPS Positioning Principle
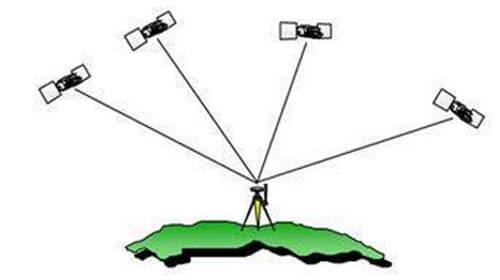
The basic principle of absolute positioning by GPS is based on the observed geometric distance between the GPS satellite and the user receiver antenna, and the instantaneous coordinates of the satellite (XS, YS, ZS) to determine the location of the point corresponding to the user receiver antenna, i.e. the location of the observatory.
Let the phase center coordinates of the receiver antenna be (X, Y, Z).
The instantaneous coordinates of the satellite (XS, YS, ZS) can be obtained according to the navigation message, so there are only three unknown quantities X, Y, Z in the equation, and the coordinates of the station (X, Y, Z) can be solved as long as three GPS satellites are received at the same time. It can be seen that the essence of GPS single-point positioning is the backward rendezvous of spatial distance.
Absolute GPS positioning map
Relative GPS Positioning Principle
The relative GPS positioning also called differential GPS positioning, is the most accurate positioning method in GPS positioning at present.
The basic positioning principle is to use two GPS user receivers placed at the two ends of the baseline and observe the same GPS satellites synchronously to determine the relative position or baseline vector of the baseline endpoints (measurement sites) in the WGS-84 coordinate system.
GPS post-processing positioning methods
At present, the relative positioning mode is widely used in engineering. The post-processing positioning methods are static GPS positioning and dynamic GPS positioning.
Static relative GPS positioning
(1) Method
Several GPS receivers are placed on the endpoints of the baseline, kept stationary, and more than 4 satellites are observed simultaneously. Several periods of time can be observed, with each period lasting from ten minutes to about one hour. Finally, the observation data are input into the computer and the coordinates of each point are calculated by the software.
(2) It is the most accurate operation mode. It is mainly used for geodesy, control measurement, deformation measurement, and engineering measurement.
(3) Accuracy can reach (5mm + 1ppm)
Dynamic relative GPS positioning
(1) Method
First, establish a reference station, and place a receiver on it to continuously observe the visible satellite, another receiver in the first point of static observation for a few minutes, and then in the other points in turn to observe a few seconds. Finally, the observation data are input into the computer and the coordinates of each point are calculated by the software. The operating range of dynamic relative positioning generally cannot exceed 15km.
(2) It is suitable for fractional measurement with low accuracy requirements.
(3) Accuracy can be achieved (10-20mm + 1ppm)
GPS real-time dynamic positioning (RTK) method
- RTK working principle and method
Compared with the dynamic relative positioning method, the positioning mode is the same, only a set of data chains is added between the reference station and the mobile station to realize the real-time calculation and real-time output of the coordinates of each point.
- RTK is suitable for the construction sampling and fragmentation measurement which does not require high accuracy.
- The operating range is about 10km.
- Accuracy can be achieved (10-20mm + 1ppm)
Besides the GPS Positioning Principles and Applications article, you may also be interested in the below articles.
What Is The Core 5G NR Technology?